Abstract
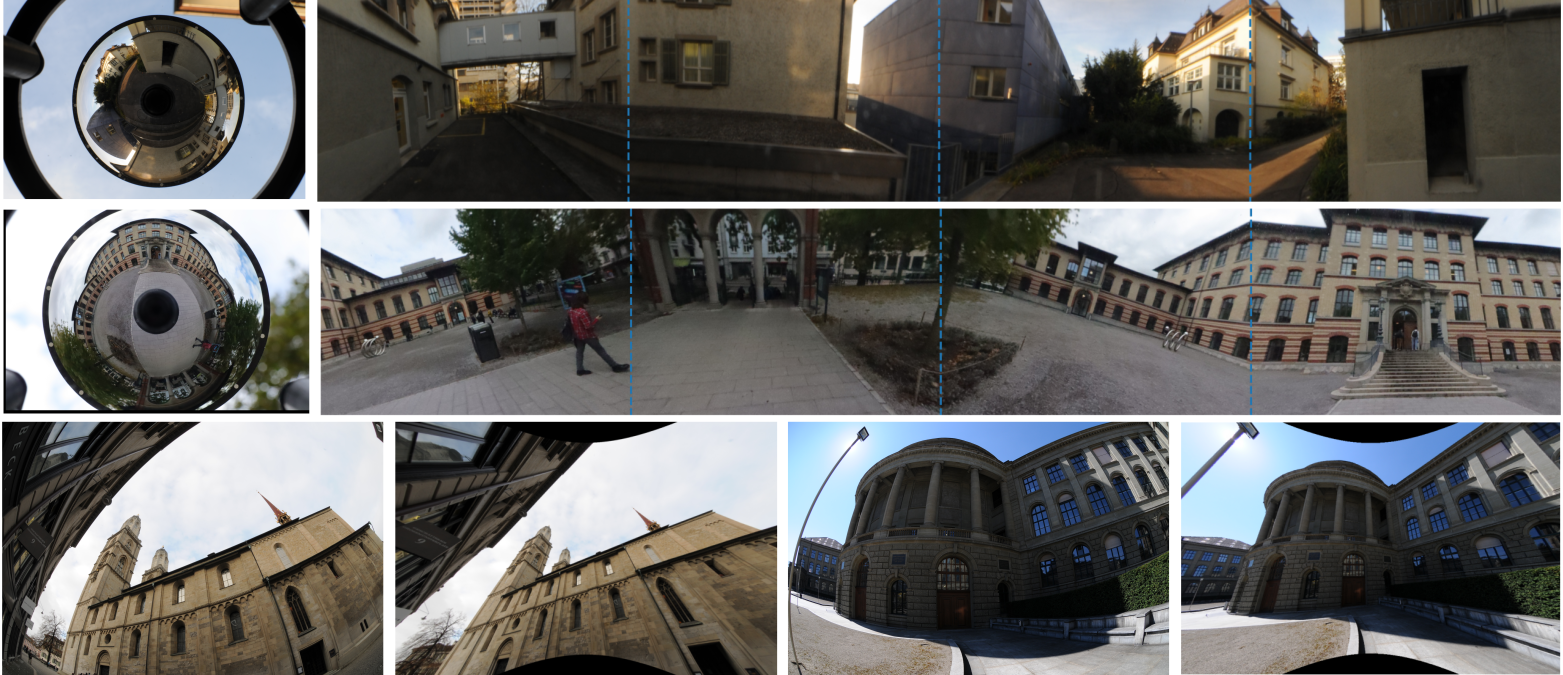
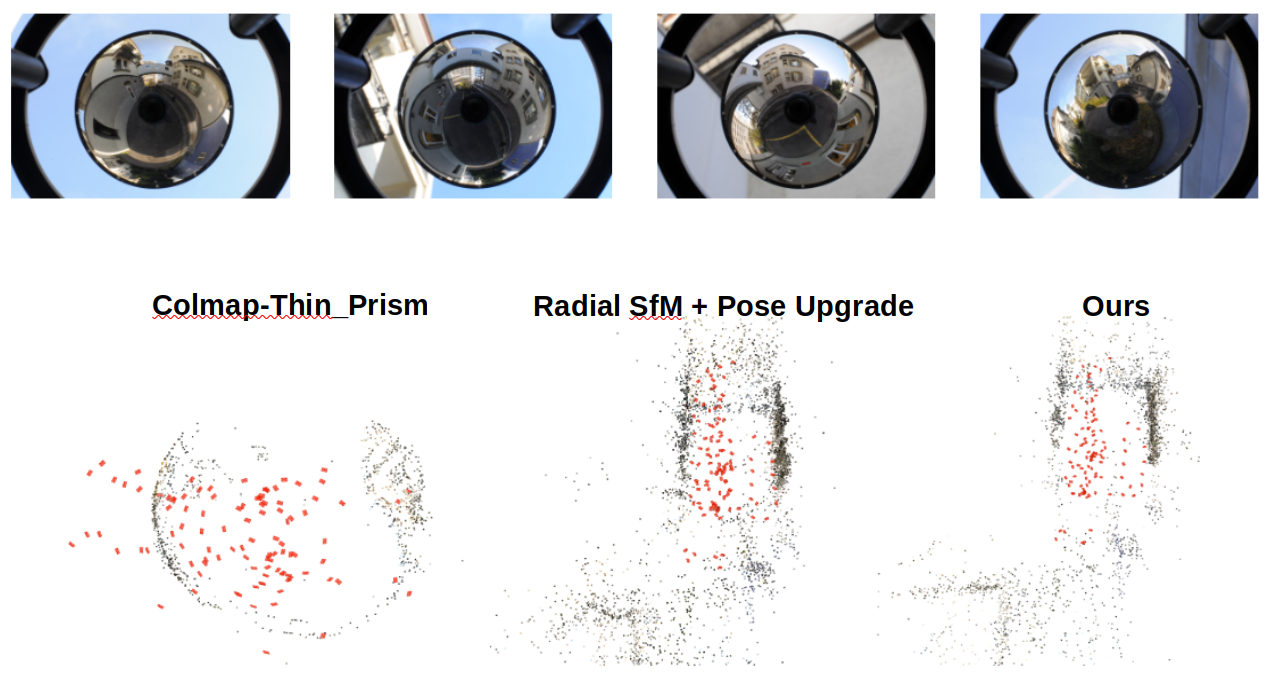
In this paper, we present a new generic Structure-from-Motion pipeline, GenSfM, that uses a non-parametric camera projection model. The model is self-calibrated during the reconstruction process and can fit a wide variety of cameras, ranging from simple low-distortion pinhole cameras to more extreme optical systems such as fisheye or catadioptric cameras. The key component in our framework is an adaptive calibration procedure that can estimate partial calibrations, only modeling regions of the image where sufficient constraints are available. In experiments, we show that our method achieves comparable accuracy to traditional Structure-from-Motion pipelines in easy scenarios, and outperforms them in cases where they are unable to self-calibrate their parametric models. Code could be found here.