Abstract
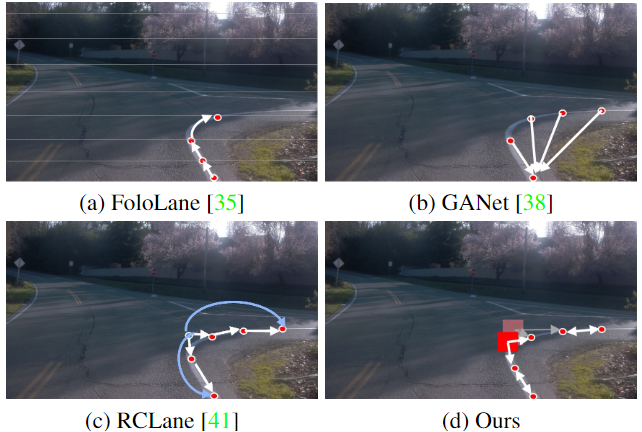
Lane detection is one of the fundamental tasks for autonomous driving, and still remains challenging due to the slender shape and rare appearance in the scenes. Current predominate works follow a top-down anchor-based or parametric curve based approach, which struggles to handle complex lane topologies such as Y-shape and Fork-shape. A more flexible keypoint-based approach tends to struggle when partial occlusions appear. We propose a novel scheme for keypoint-based lane detection, which is achieved by representing the lanes as fixed-number modeled skeleton and bringing in the notion of composite fields to jointly estimate the keypoint locations and associations. Our real-time capable method achieves state-of-the-art performance on both the OpenLane benchmark and among the keypoint-regression based approach on CULane benchmark. The superior performance on crowded scenes with severe partial occlusions, compared to other keypoint- based methods, highlights the advantages of structurally embedding the complex spatial relationship with composite fields.